出展社情報
Mobiltech
ライダー融複合センサーSW及び超実感型デジタルツイン- カテゴリー
- S/W・自動運転
- キーワード
- 自動運転
企業セールスポイント
・車両メーカーとのコラボレーション
- – 現代自動車、現代モービス、現代ロテムなど多数の量産車および自動運転車メーカーと協力した経験を保有
- – レベル4 自動運転車ライダーシステム設置(現代自動車 IONIQ5)
- – 3Dライダーで構成されたAI学習データ収集(現代自動車 IONIQ5)
・データ収集サービス
- – 複数のライダーとカメラで構成されたセンサーシステムに特化したデータ収集サービスを提供
- – シナリオベースのデータ収集およびデータキュレーションサービスの提供
提案内容
主要製品
・自動運転用ライダー融複合センサーSW
- – 異なるセンサー間の正確な同期とキャリブレーションによるデータ構築
- – カメラ・ライダー・GPS・レーダー・3D Mapなど融複合センサー処理技術保有
- – センサーメーカーに関係なく、Mobiltechの同期ボードとセンサー融合SWを活用し、劣悪な環境での走行中でも高精度のセンサーデータを取得可能
- – 取得したデータを基に人工知能学習データ及び自動運転車制御に活用可能
- – 自動運転およびADASソフトウェア開発に必要な正確な走行データを取得可能
- – 車両制御アルゴリズムに活用可能
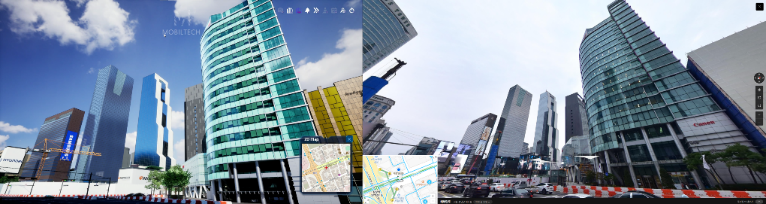
・超実感型デジタルツイン、レプリカシティ
- – 3Dライダーを使用して都市部の1:1スケールの3Dモデルを提供
- – AIを利用した分析を通じてPBR要素を提供し、非常にリアルな視覚化が可能
 < 超実感型デジタルツイン レプリカシティ > < 超実感型デジタルツイン レプリカシティ > |
自動運転用ライダー融複合センサーSW 及び 超実感型デジタルツイン
・自動運転用ライダー融複合センサーSW
1) 自動運転センサー同期システム
- – LiDARセンサーがCamera方向と同じ角度でスキャンする際にデータを取得することで、LiDAR、Camera、センサー間の誤差を最小化
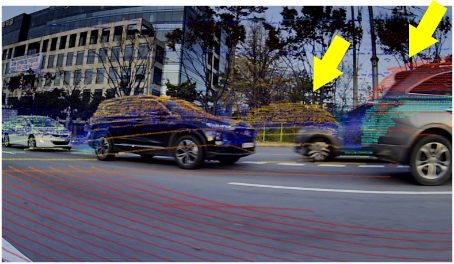 <誤差発生/calib正常/移動中> <誤差発生/calib正常/移動中> |
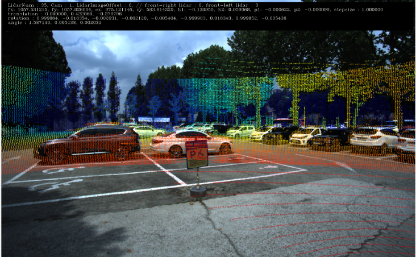 <calib正常/停止中> <calib正常/停止中> |
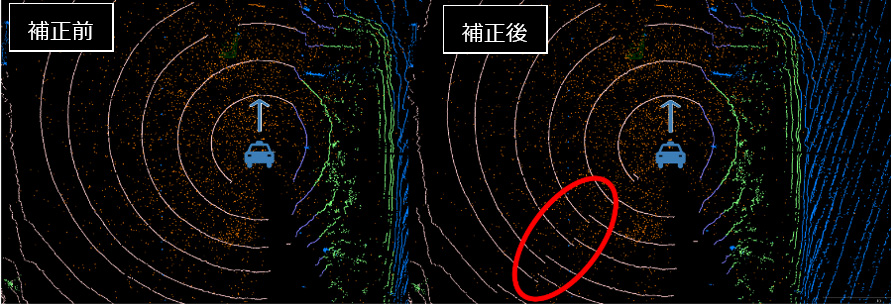
2) GNSS/INSSベースライダー データ歪み補正技術
- – 車両の移動、振動を予測してライダー データの歪み補正
3) 自動運転に使用されるセンサー間キャリブレーション技術
- – Camera、LiDARマルチセンサー融合技術
- – センサーシステム30m以内の距離物体に対する<1ピクセル誤差基準

- データ収集サービス
- – 複数のライダーとカメラで構成されたセンサーシステムに特化したデータ収集サービスを提供
- – シナリオベースのデータ収集およびデータキュレーションサービスの提供
- 超実感型デジタルツイン レプリカシティ
- – リアルタイム空間情報をデジタルツインに反映
- – 3Dライダーを利用して正確なスケールの高精度HDMAPを実現
- – AIを利用した分析を通じてPBR要素を提供し、非常にリアルな視覚化が可能
- – 現実世界と同じスケールの都市空間を実現
- – 正確な位置座標で様々な位置基盤サービスに活用可能
- – センサーシミュレーション、自動運転シミュレーションなど、より複雑なモビリティ研究開発に活用可能

こちらの出展社との商談をご希望の方は、
「来場登録&商談申請」からお申込をお願いします。