出展社情報

WAYS1
様々なデータ形式に対応する高解像度Map- カテゴリー
- S/W・自動運転
- キーワード
- ADAS
企業セールスポイント
精密なHDマップ技術を基に韓国LDMの国家標準に合わせて製作
自動運転とスマートモビリティで不可欠な高解像度(HD)地図技術を保有
3D空間データを提供して自動運転車両の認識と走行精度を高めるLDM国内標準技術を保有
自律協力走行のための技術力を保有
車両と道路インフラ間のシームレスなコミュニケーションのためにV2Xベースの自律走行ソリューションを提供
スマートシティおよび交通管制システムと連携し、道路運営効率を高めることができる技術力・研究開発人材・施設を保有
R&D研究員及び施設保有
全職員155人中25人が 研究開発人員、 パンギョに研究開発所を保有
海外拠点でもしっかりした生産能力保有
自社のmms装備を活用し、現地調査実施後の地図制作のためのポイントクラウドデータ収集
point cloud data 生成・加工・編集の全過程が自社で対応可能、納期準拠可能
生成した地図データは、顧客の要求する形式のデータ形式へカスタマイズ可能(NGII、Lanelet2、XODR、Apollo、LDM)
提案内容
主要生産製品
様々なデータ形式に対応する高解像度Map
| 従来技術 | 新技術/開発技術 |
| SD Map (標準解像度マップ)、ADAS Map
・ 基本的な道路と地形データを提供 ・ 一般的な地形情報の表示と確認が可能 ・ 2次元(2D)ベースの概略図 ・ 静的データベースの定期的な更新 ・ GPSとGISデータを活用して地図データを構築 ・ 道路の幾何学的データとレーン情報を含む |
HD Map (高解像度マップ)
・ 20 cm以内の正確な位置を提供 ・ レーン幅、曲率、レーンタイプまで詳細なデータを提供 ・ 3Dベースの精密地図 ・ 動的データ反映されリアルタイム更新可能 LiDAR、カメラなどセンサー連動可能 ・ リアルタイム交通および道路状況を反映して 自動運転車両に最適化された地図データを提供 |
| 車両のセルフセンサーを活用する自動運転方式
・ 車内カメラ、LiDAR、GPSで走行 ・ 車両周辺のオブジェクト認識に依存した走行 ・ 死角地帯が発生 |
道路インフラが提供する動的情報を活用する方法
・ インフラとLDMの情報から道路上のRSUを通じてV2X方式で走行 ・ 道路や交通のデータ変化リアルタイムで反映して走行 ・ 死角地帯の情報を見逃す不便さを解消 |
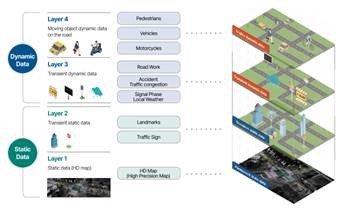
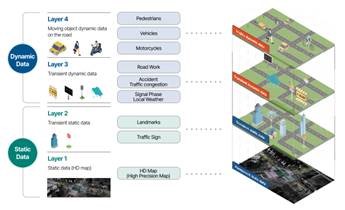
LDM(ローカルダイナミックマップ )
・ 道路環境の静的(Static)および動的(Dynamic)情報を統合し、
車両とインフラストラクチャが共有できるようにするコア技術
・ ステップ4(レベル)の階層
level 1: 静的地図データ (HD map)
level 2:準動的地図データ(比較的ゆっくり変化するデータ)
level 3: 動的地図データ(リアルタイムで変化する交通情報)
level 4:超動的データ(道路上のイベント、突発状況、歩行者など)
・ Edge Computing、リアルタイムセンサ融合の技術活用
・ 自動運転車両の精密位置認識向上
・ リアルタイム交通データを反映して安全性と効率性を向上
・ 道路状況を事前に予測して事故リスクを軽減
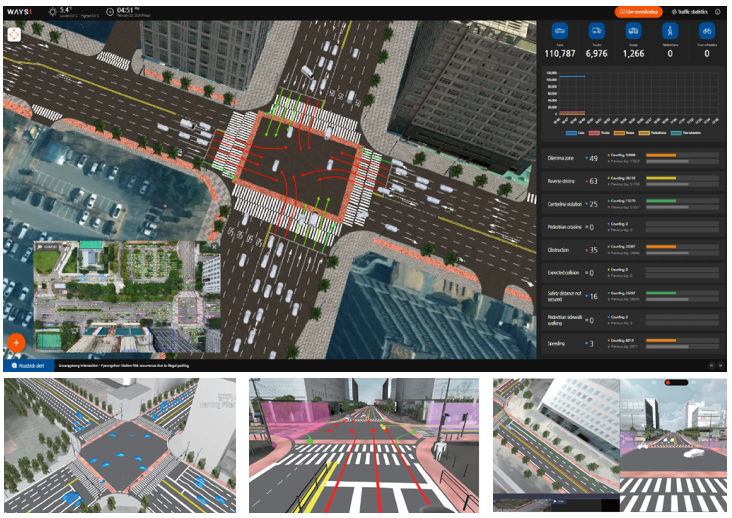
LDM TWIN
・ HD map(精密マップ)とLDM(動的情報マップ)を融合した
デジタルツインベースの交通管制プラットフォーム
・ 自動運転用精度で地図を介して実際の道路を正確に再現後、
移動体の正確な位置を表示し、カスタマイズされた分析画面を提供
・ 交通管制の効率性を高め、自律走行車両の安全な運行を支援
・ LDM TWINの主な機能
交通統計情報の提供
車道別待機状況分析
危険な状況の判断と予測
リアルタイム信号情報表示
こちらの企業とのオンライン商談をご希望の方は、
「オンライン商談」からお申込をお願いします。